Next-generation ADAS for safety, reliability, and scalable autonomous driving.
Utila Legend
ADAS Solutions
-

Platform Integration
Offers integration of data, communication, and control with leading development and simulation tools, including functional safety analysis, Ethernet testing, and scenario analysis software.
-

Development & Upgrades
Provides development services in SOTIF, vehicle-infrastructure coordination, and sensor modeling, with solutions for annotation, analysis, scenario mining, and optimization using driving, map, and traffic data.
-

End-to-End Services
End-to-end platforms support cloud simulation, architecture design, closed-site, and public road testing for autonomous driving.
-

Modular Configuration
Software products use modular designs—data management, vehicle and sensor models, scenario libraries, and cloud services—enabling flexible data migration, deployment, and debugging.
Our Services
Testing Platforms
Closed-Loop Simulation & Validation
ADAS Simulation Data & Assets
Driving Scene Simulation Software
Vehicle Simulation Software
Scenario Generation Software
Sensor Simulation Software
Closed-Loop Simulation & Validation
-
![]()
WS/Basic General Simulator
20k+ L2–L5 scenarios, metric-driven validation, three engines—general-purpose plus first-/second-gen in-house.
-
![]()
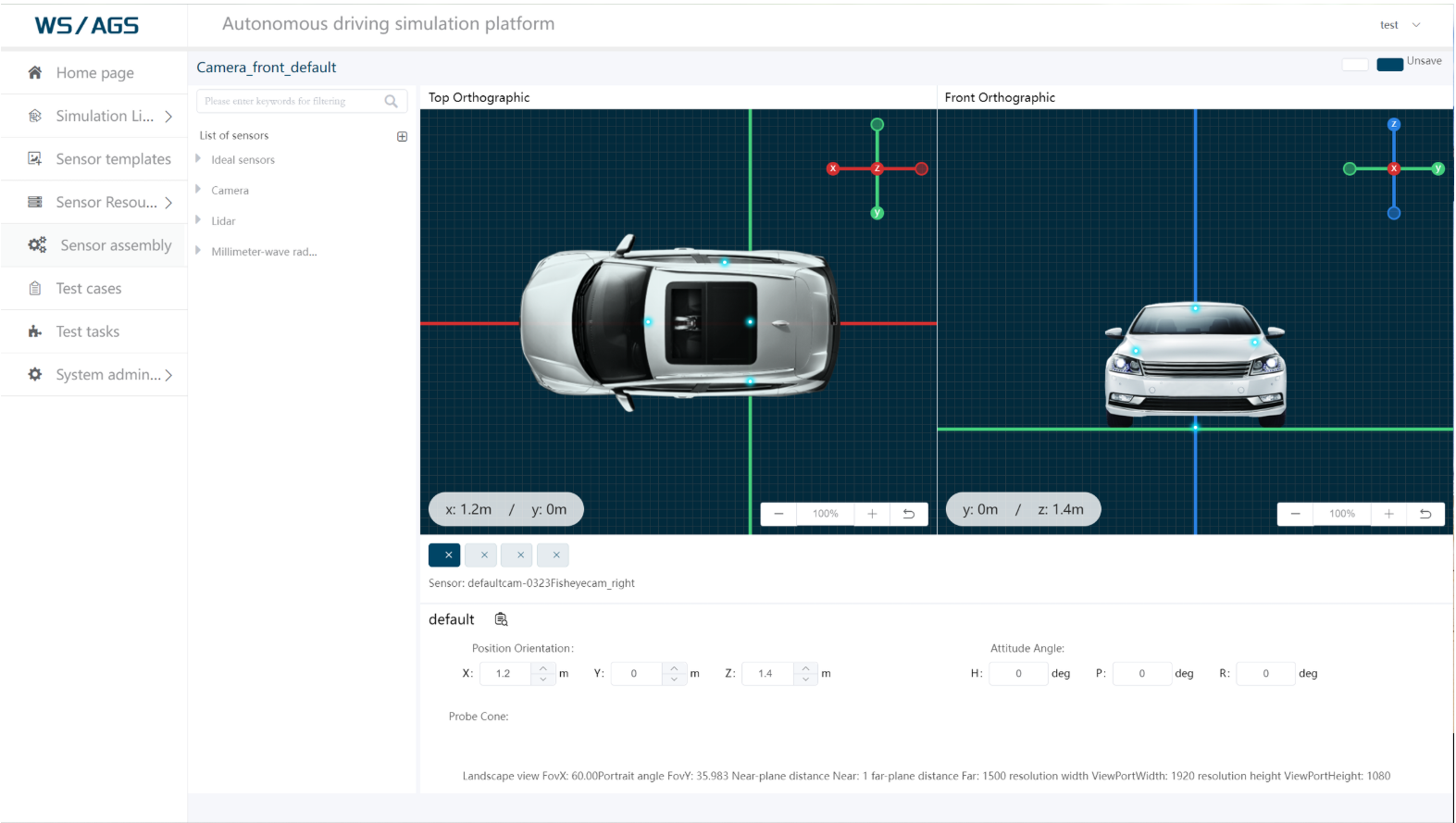
WS/AGS General Simulator
Cloud platform with 30k+ scenarios, VTD/Prescan/SCANeR & CarSim integration, AI dynamics (15+ DoF), L0–L4 evaluation, 24/7 ≥1M km/day—hybrid or private cloud.
-
![]()
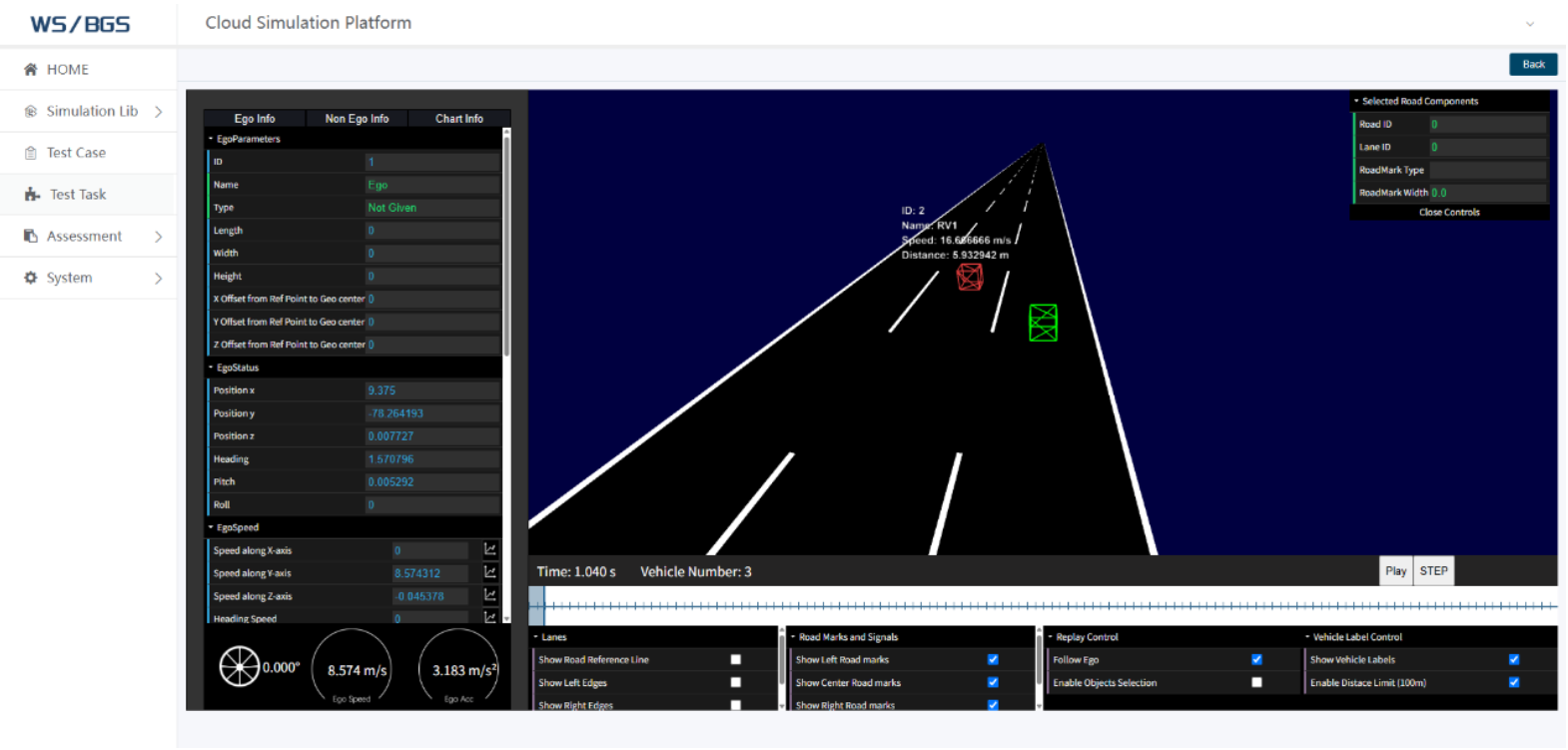
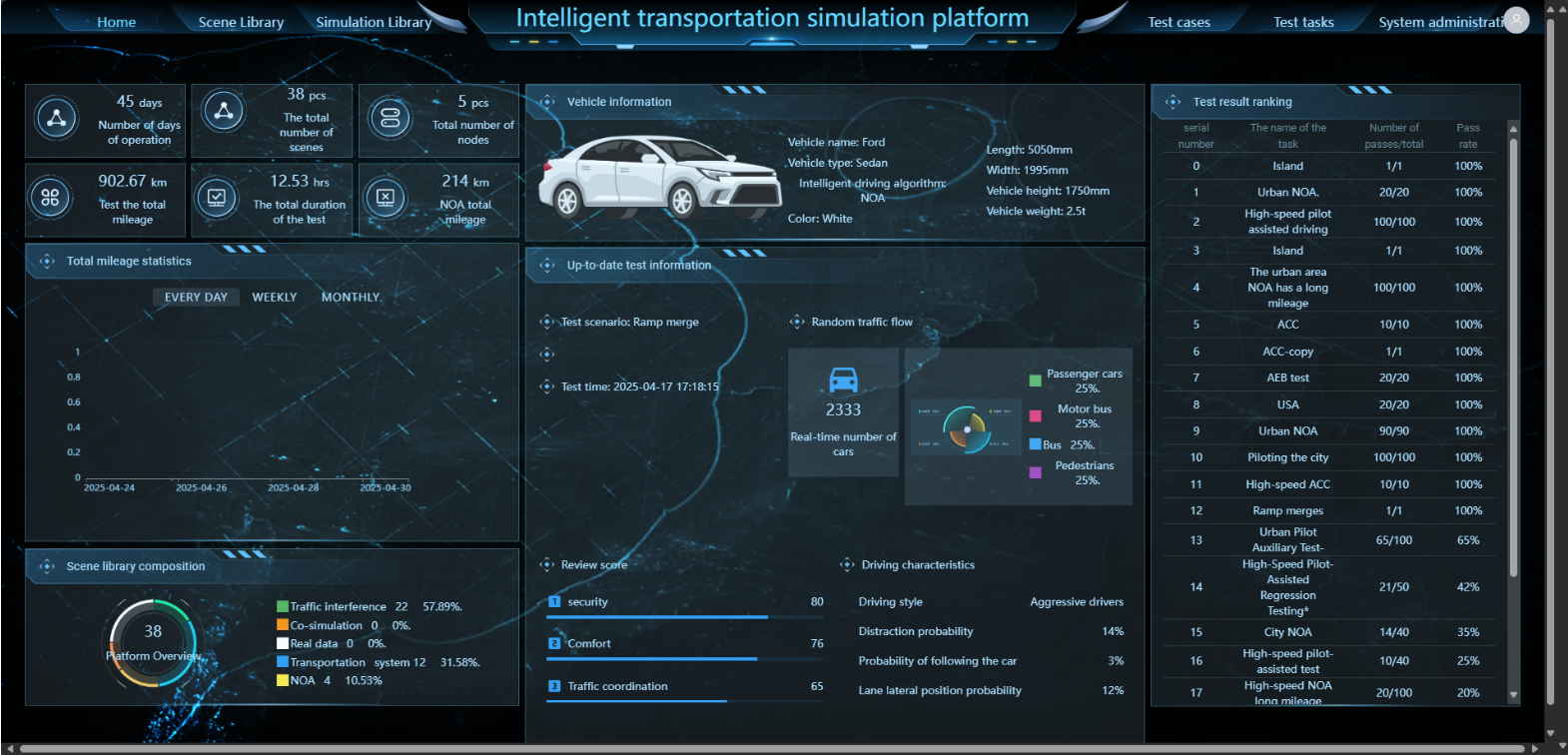
WS/Intelligent Traffic General Simulator
Unified traffic-flow platform: data + emulation + dynamics; 1,000+ scenarios; online stochastic configs; visual analytics & playback; cloud high-concurrency; supports ADAS simulation, network emulation, and integrated validation.
-
![]()
WS/Evaluation
Evaluation suite—scenario/resource/functional/safety/SOTIF—with data→target ID→algorithm→results pipelines and a metrics library (general/functional/safety/V2X) for testing and analytics across autonomy levels.
-
![]()
WS/Dynamics
2 high-precision + 13 semi-precision model sets; reconfigurable/rapid modeling; co-simulation tests with auto evaluation reports.

Testing Platforms
-
![]()
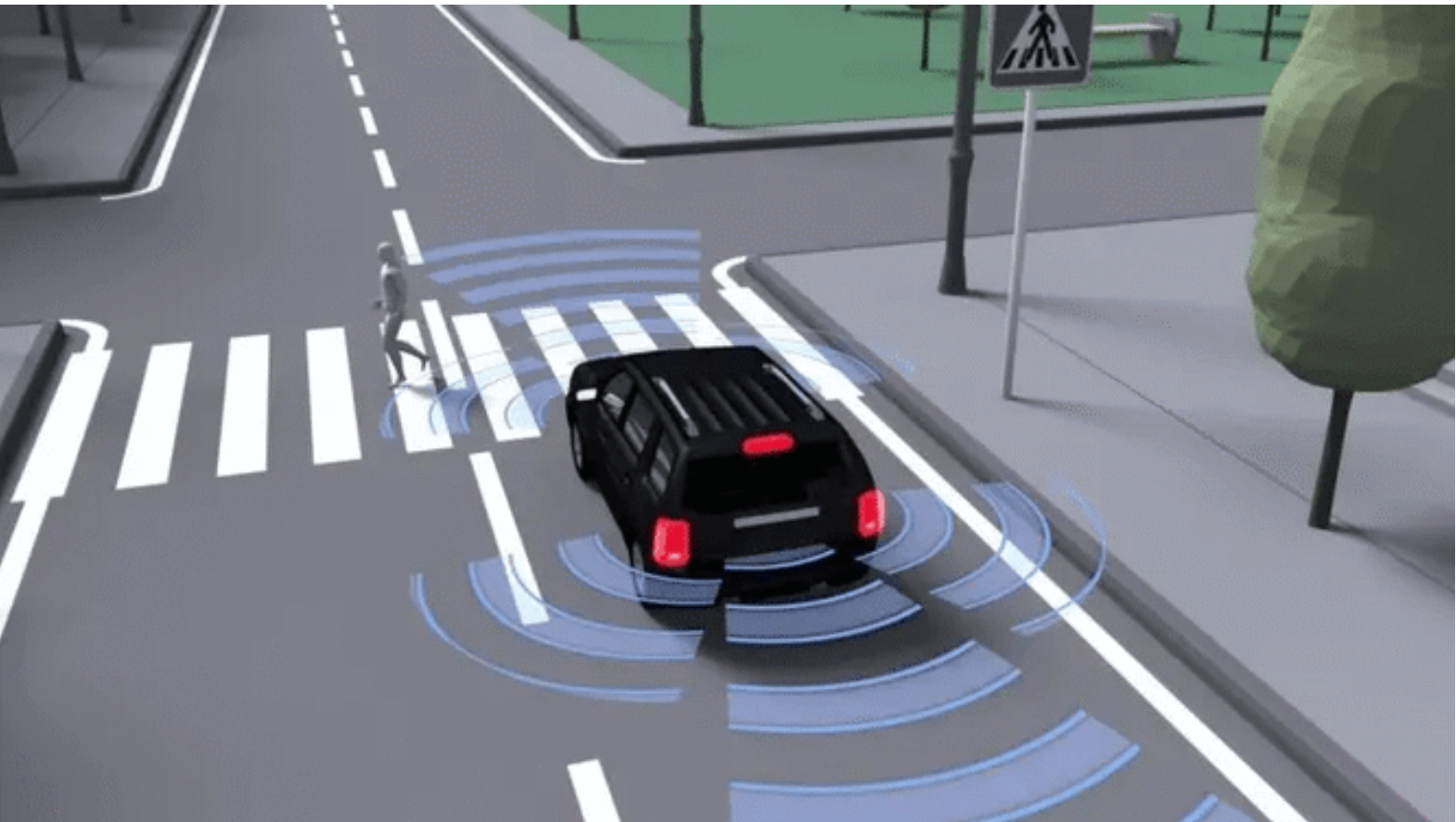
ADAS Testing
Closed-loop ADAS: VTD/CarSim/VRX-Sensor + custom models; MIL/SIL/HIL; dark-box/video-inject/ultrasonic/mmWave; DIL & chassis-dyno ready; automated test/case/scenario/model mgmt with analytics.
-
![]()
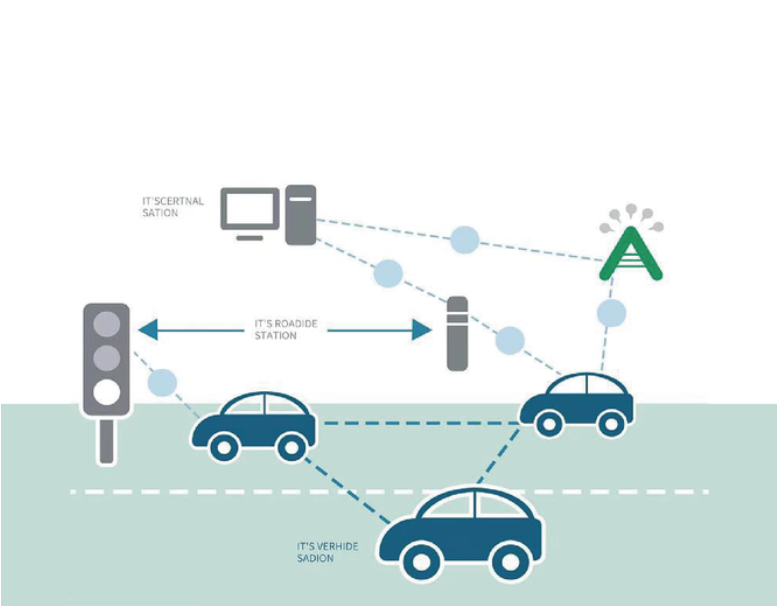
V2X Testing
V2X AIL + end-to-end; EMC interference tests (single-freq multi-user, multi-freq coexistence, correlated); V2X models + universal stack; VTD/Prescan & SUMO/VISSIM compatible; unified field/road/sim analysis.
-
![]()
Network Simulation & Testing
IoV sim: host + bus models; CAN/Ethernet; Wi-Fi/4G-LTE comms & TSP service simulation; CANoe integration and CAN/Ethernet model compatibility.
-
![]()
Cockpit Testing
Real-time DIL cockpit: VTD-based high-precision/virtual-calibration sims; scenario libs/design; vehicle/prototype mods; steering/throttle/brake HW; multi-screen; ADAS integration; cluster UI; expandable to multi-DoF motion + hub dyno.


ADAS Simulation Data & Assets
-
![]()
Scenario Library
30k+ L2–L5 scenarios—naturalistic, hazard, regulatory, ODD/expert, parametric, digital-twin, SOTIF (ISO 21448). Subscriptions + custom.
-
![]()
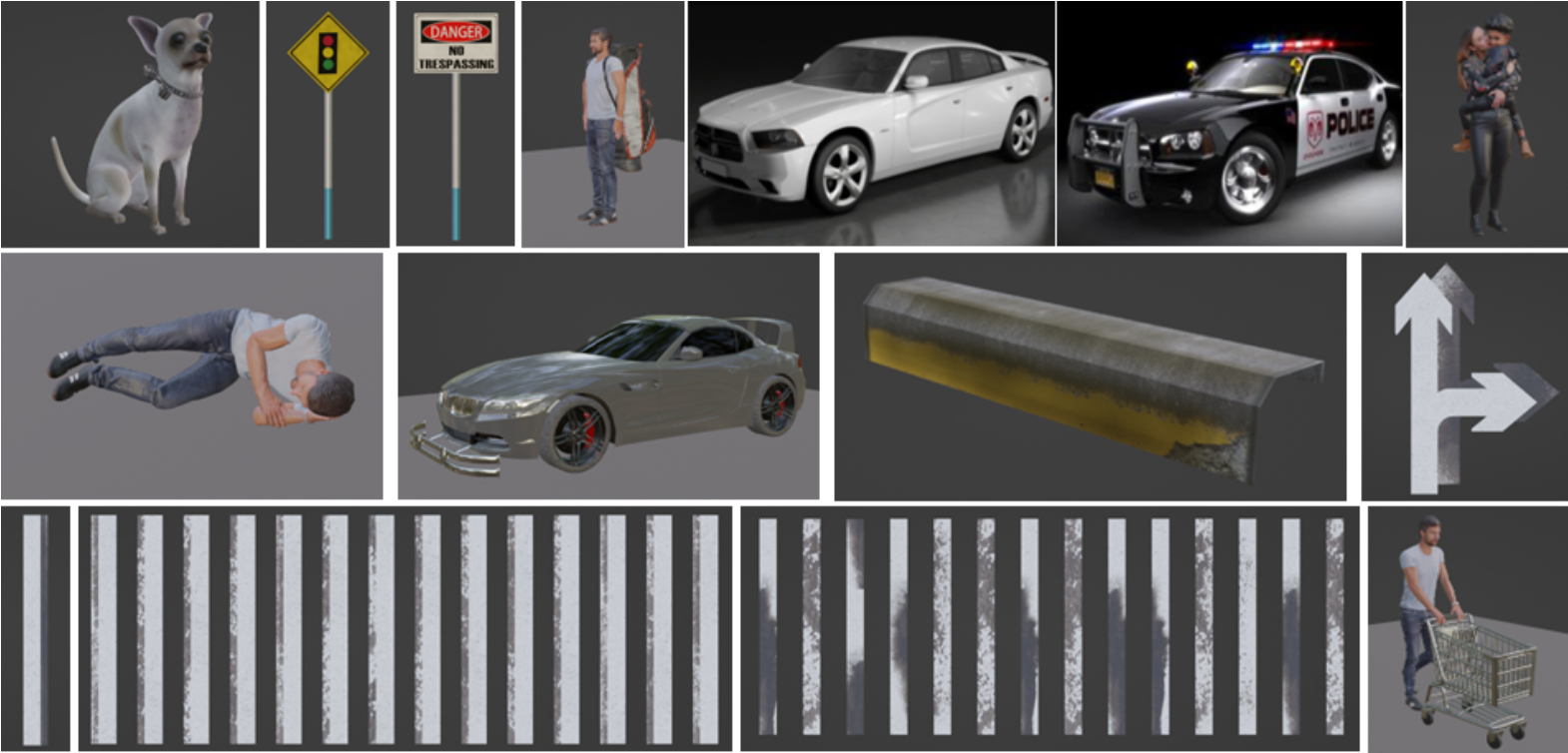
Model Library
2,000+ high-precision models—localized signs/architecture, barriers & infrastructure, passenger/commercial/special vehicles, complex participants—plus custom modeling on demand.
-
![]()
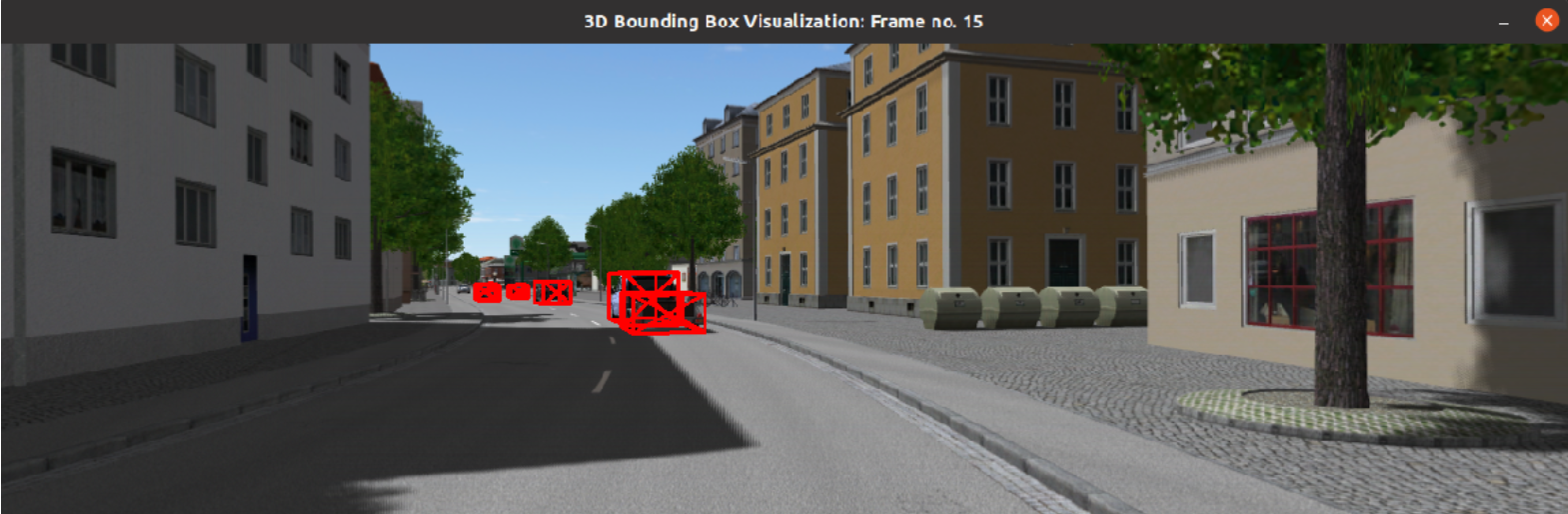
Dataset
KITTI: images + 2D labels, LiDAR + 3D boxes; curated AEB/hazard/HWP/highway subsets.
-
![]()
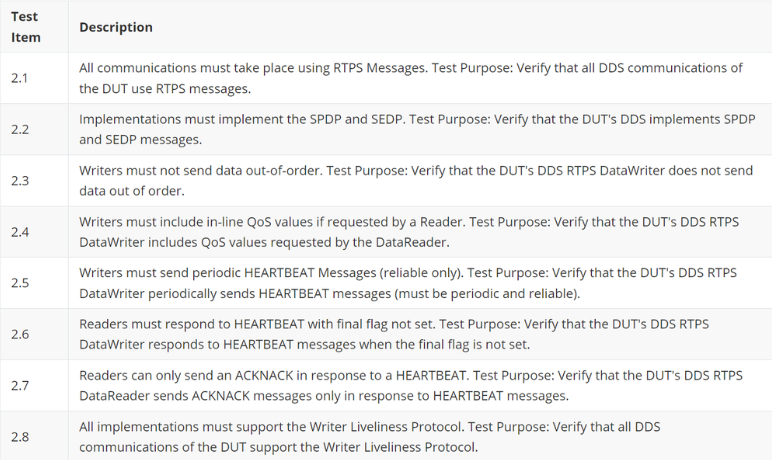
Standard Test Case Repository
Covers DDS, QoS, SOA, performance, fault-injection, domain control, and HIL/XIL.
-
![]()
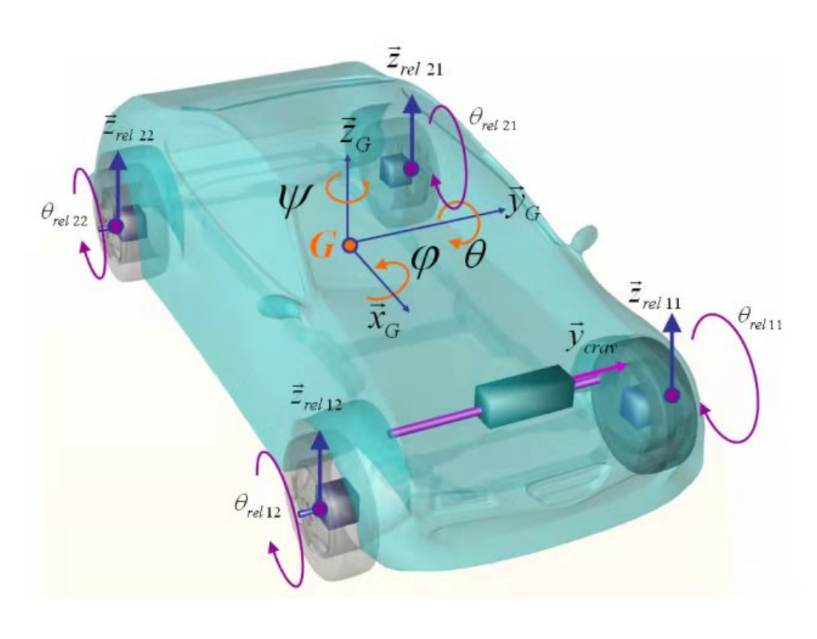
Vehicle Dynamics Model
Multi-DoF vehicle models (S/3/Y, Eletre); body/steering/suspension/powertrain/tire–road; HIL/PIL/VIL, powertrain tests, field & cloud sims, virtual–physical co-simulation.
-
![]()
Data Storage System for Autonomous Driving
L3+ AD “black box” (SAE J3197): −15s/+5s events (video+CAN) or continuous; ≥8h storage, ≥2,500 positioning events; power-off & tamper protection; Ethernet/CAN FD/A2B.
-
![]()
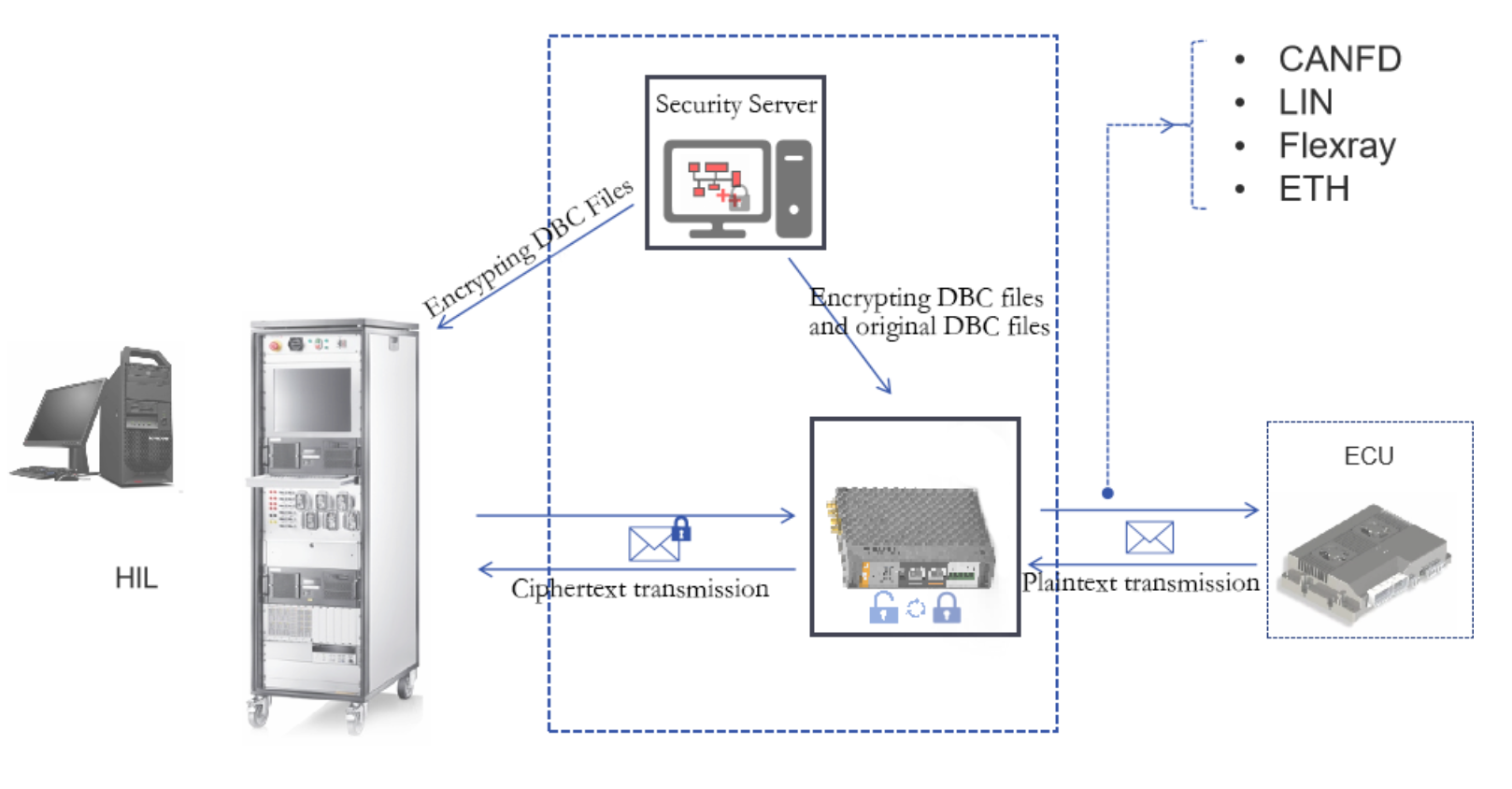
Vehicle Bus DBC Encryption System
Server+gateway encryption for DBC/LIN/FIBEX and BLF/ASC/PCAP, plus real-time bus traffic; on-prem/cloud B/S; RBAC (admin/designer/user); CAN/CAN FD/LIN/FlexRay; <5 ms latency; network/USB import.
-
![]()
Vehicle Control Unit
EV VCU: energy/torque/motor-battery/safety/UDS; AURIX/NXP 32-bit, AUTOSAR CP, ISO 26262 ASIL-D, security chips; CAN comms, MATLAB/Simulink, flashing; CCP/XCP calibration; DVPR/EMC + EOL; for passenger cars/buses/logistics EVs.


Driving Scene Simulation Software
-
![]()
VTD
High-fidelity traffic sim, flexible triggers, third-party co-simulation, and real-time sensor outputs (target lists or raw data).
-
![]()
CARLA
Open-source Unreal/C++ sim for traffic/pedestrians/sensors with a Python API for scripted control.
-
![]()
VISSIM
Microscopic, behavior-based traffic/pedestrian sim; tests adaptive signals, routing, and C2X.



Sensor Simulation Software
-
![]()
WAY-SENSOR
LiDAR/mmWave model suite: parametric point rate, H/V FOV, resolution; VTD-integrated; standalone & cloud-ready.
-
![]()
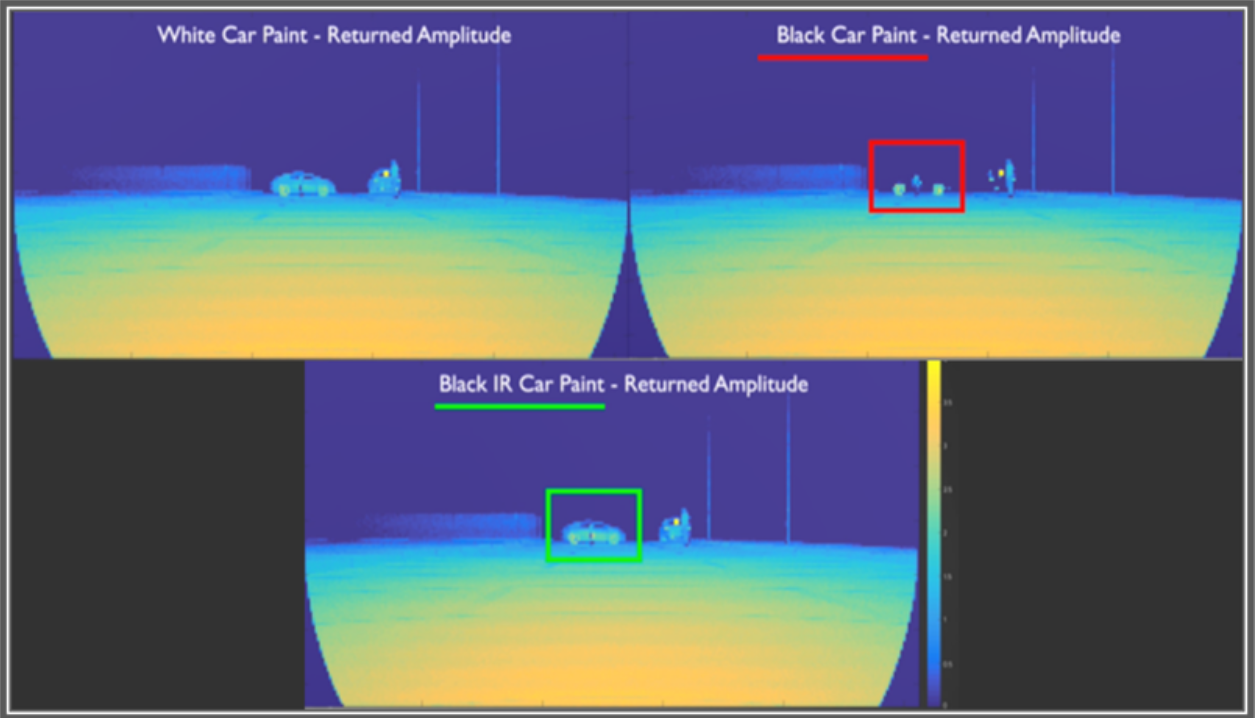
VRX-Sensor
Integrated camera/LiDAR/mmWave sim—physics-level, real-time; virtual-drive validation + environment/traffic-impact analysis.
-
![]()
VRX-Speos
Camera/FOV analysis; lighting-aware sensor evals (parking assist, blind-spot, NHTSA rear visibility, pedestrian/FOV) with post-processing on raw sim views.

Vehicle Simulation Software
-
![]()
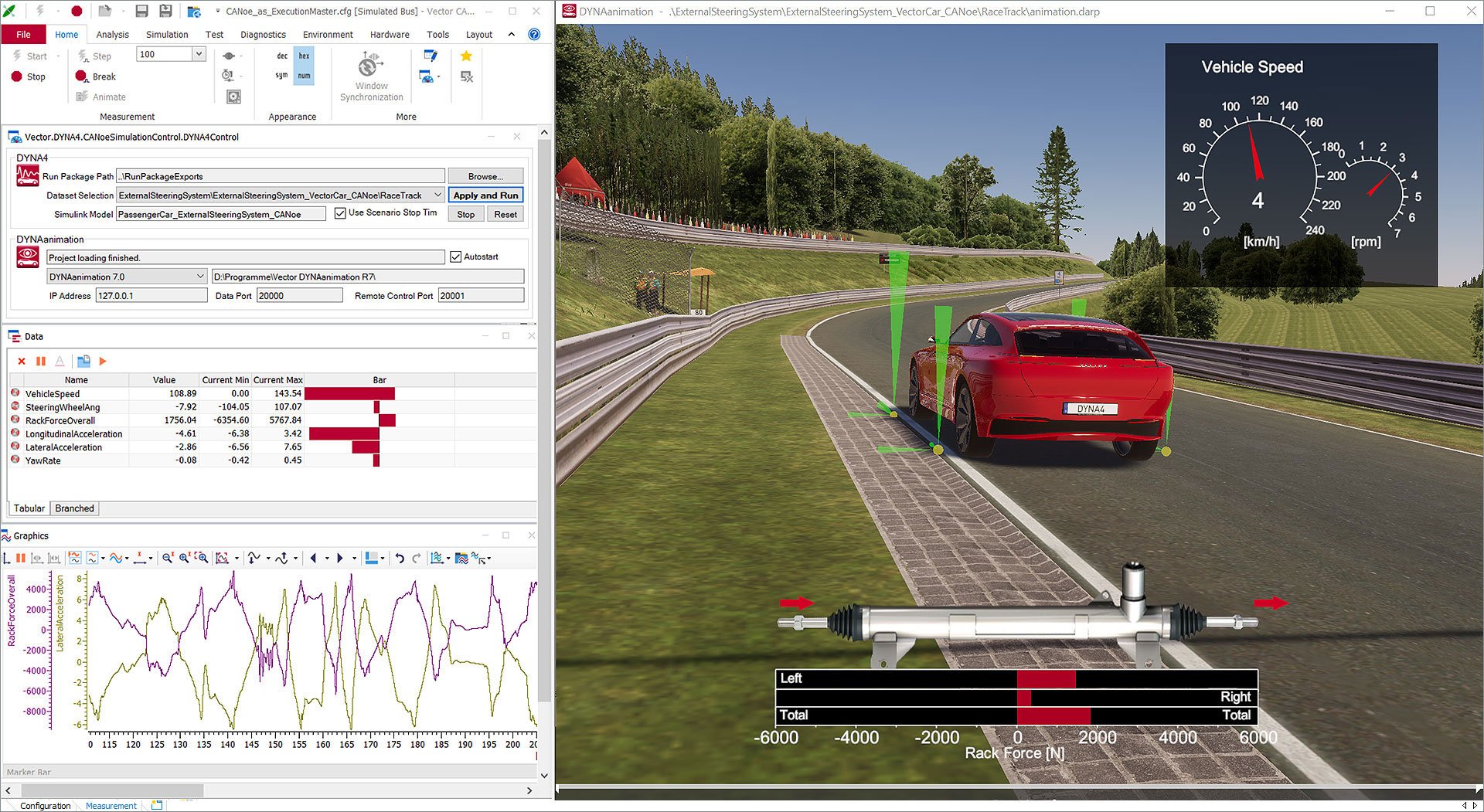
DYNA4
Virtual sim for passenger/commercial; dynamics + ICE/EV + ADAS sensors + traffic; safer, faster development & validation.
-
![]()
TruckSim
Vehicle-dynamics sim: handling/performance/economy/comfort with real-time DIL for experiential tuning.
-
![]()
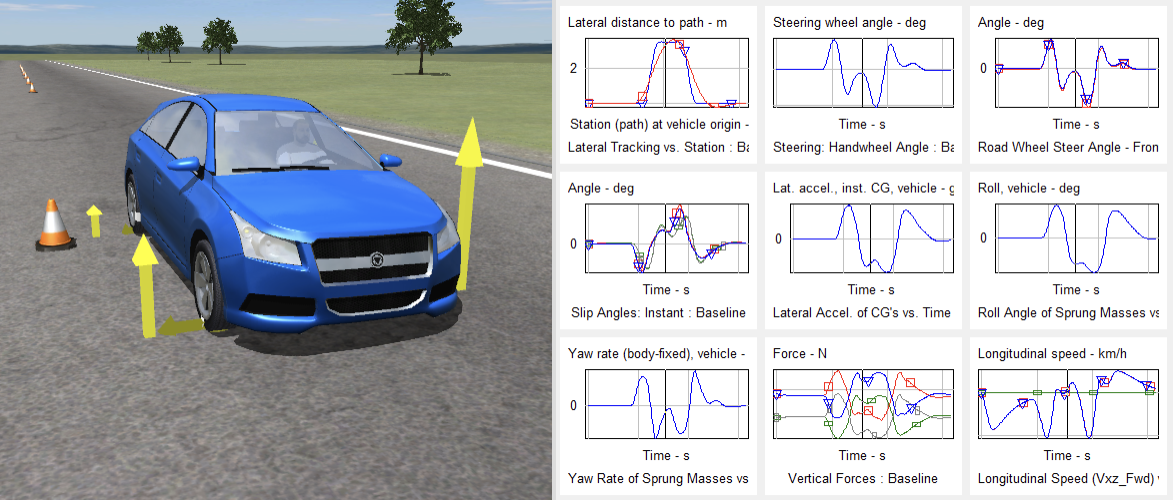
CarSim
Vehicle-dynamics sim for full-vehicle handling/control-system development; CarSim supports flexible test setups and procedures.

Scenario Generation Software
-
![]()
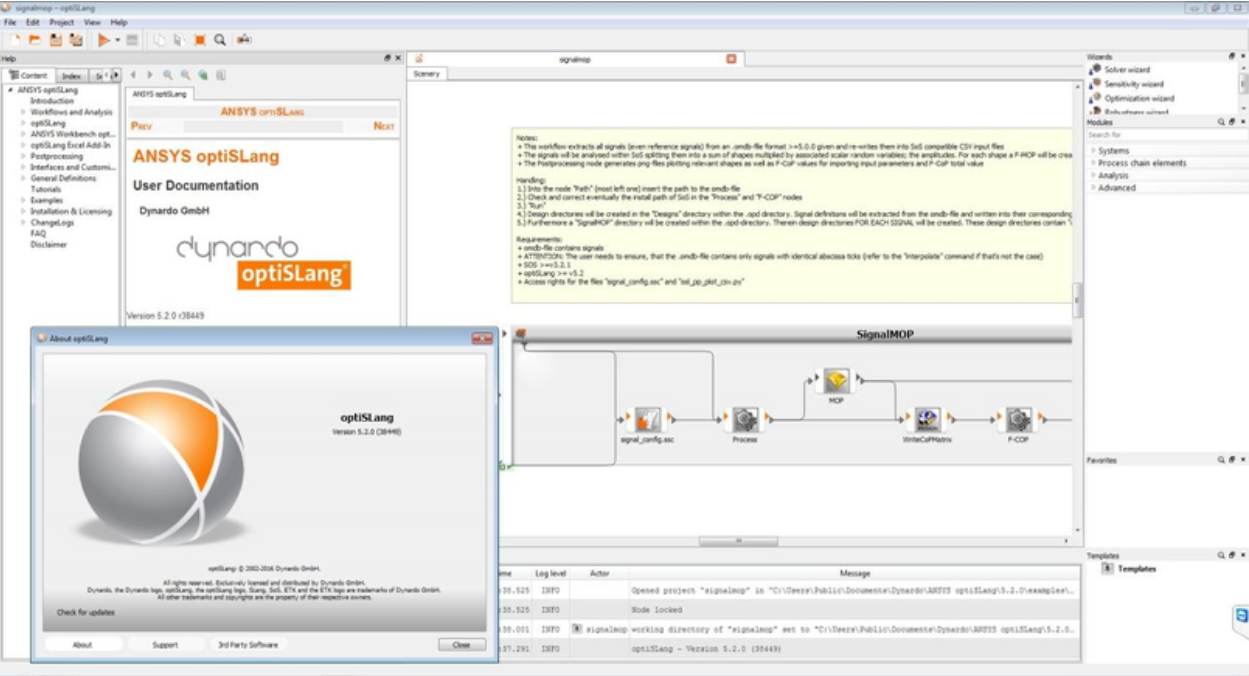
optiSLang
Achievable ODD & convergence analysis; parameter sensitivity + iterative sampling; end-to-end parameter design; VTD co-sim.
-
![]()
HEEDS
Automated combinatorial scenario generation; auto-creates critical cases and optimizes unpredictable edge scenarios.